扔東西比你還準的優(yōu)傲機器人
發(fā)布時間:2021-06-23 19:15:06 作者:顯揚科技
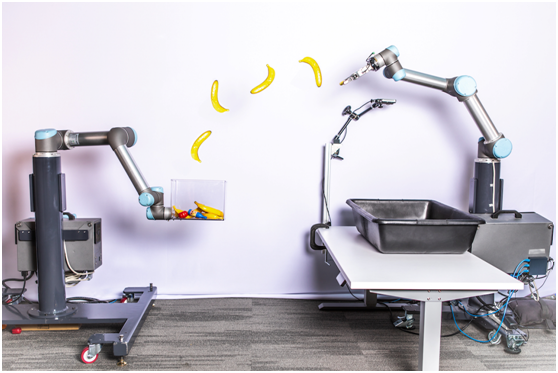
谷歌和普林斯頓基于優(yōu)傲機器人開發(fā)的“TossingBot”可以教會自己拋出比大多數(shù)人更準確的任意物體。
“TossingBot”可以通過最少的人為干預(yù)來自我掌握和投擲。在很短的時間內(nèi),,它能夠足夠精確地操作,可以應(yīng)用于實際的實際揀貨系統(tǒng),。
任何曾經(jīng)試圖學習如何正確地投擲東西的人都可以證明,需要做很多練習才能做到正確,。不幸的是,,大多數(shù)人都沒有足夠的天賦來獲得我們開發(fā)的技能,以便出于奇怪的原因?qū)⑦@些技能轉(zhuǎn)化為日常實際任務(wù),。但是想象一下,,如果我們能夠?qū)⑷我馕矬w扔到任意位置并具有高可靠性,那么我們能夠做到這一點,,做清潔房間或分揀衣物等事情要容易得多,,它會徹底改變像倉庫這樣的工作環(huán)境,它可能會減少所有花在走路上的時間,。
現(xiàn)在,,谷歌研究人員與來自普林斯頓,哥倫比亞和麻省理工學院的合作者基于優(yōu)傲機器人一起開發(fā)了一種名為“TossingBot”的機器人手臂,,它可以教會自己非常準確地拾取和拋擲任意物體,。目標是通過優(yōu)雅高效的投擲替換整個“位置”位,顯著加快拾取任務(wù),。
一般來說,,投擲是一個非常困難的問題,值得注意的是,,從一開始人類就會通過幾乎總是使用平衡,,空氣動力學和/或?qū)ΨQ的物體來積極地簡化投擲。如果編程,,機器人可以準確地拋出不平衡或不對稱的物體,,但通常你必須指定如何單獨抓住和拋擲每個物體,找出最佳運動然后指示機器人重復(fù)它,。
學習拋出任意物體要困難得多,,特別是對于自學成熟的機器人 - 即機器人學習拾取東西并通過反復(fù)試驗拋棄它們而不是被人類明確訓練。“TossingBot”值得注意的是,,它教導(dǎo)自己能夠在最少的人為干預(yù)的情況下抓握和投擲,,并且在相對較短的時間內(nèi),它能夠足夠快速和準確地操作,,以便這些技術(shù)可以應(yīng)用于實際的實際揀選系統(tǒng),。
使TossingBot如此有用的部分原因在于拋擲技術(shù)顯著減少了機器人在拾放任務(wù)的“地點”部分上花費的時間。不是花時間把物體放下來,,而是(正如研究人員所說的那樣)物體“立即傳遞”,,并且折騰也意味著機器人的有效距離明顯長于其物理工作空間,。
在每小時超過500件物品的平均揀選率下,TossingBot在效率方面與人類在一起,,至少對于它經(jīng)歷過的特定物品組合而言,。雖然人類可能總是會更好地處理新奇物品,但TossingBot在新型物品方面表現(xiàn)相當不錯,。對于TossingBot來說,,只需要一兩個小時的訓練來獲得與已知對象類似的 性能,并且它還可以快速學會將東西扔到以前沒有訓練過的位置,。
優(yōu)傲機器人
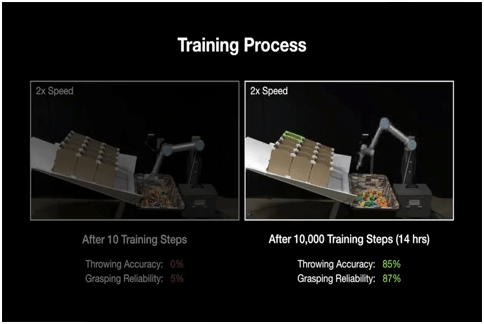
TossingBot本身的一個有趣的部分是一個深度神經(jīng)網(wǎng)絡(luò),,它以一個bin中對象的深度圖像開始,并從成功的抓取到投擲本身的參數(shù)一直進行,。由于投擲物體(特別是不平衡物體)在很大程度上取決于它是如何被抓住的,,所以同時學習抓握和投擲。通過測量投擲是否成功來判斷抓握是否成功,,TossingBot學會傾向于獲得準確投擲的掌握,。正如您從視頻中看到的那樣,學習過程本身相當聰明,,機器人可以大多只是單獨留下來自己解決問題,,在14小時的訓練時間內(nèi)管理10,000次抓握和投擲嘗試。
這個過程的一個重要組成部分是研究人員稱之為“剩余物理學”,,它提供了一種世界基線知識,,以幫助TossingBot更快地學習和適應(yīng)。

TossingBot使用深度神經(jīng)網(wǎng)絡(luò),,該網(wǎng)絡(luò)以垃圾箱中物體的深度圖像開始,,然后通過成功的抓取和投擲訓練自己。
當然,,這項研究本身還存在一些局限性,,同時,如果可以在視覺數(shù)據(jù)的基礎(chǔ)上,,引入其它數(shù)據(jù),,可能會讓系統(tǒng)變得更加準確,,更容易掌握新物體的投擲技巧,。
TossingBot具有什么樣的準確度,以及將物體投射更遠距離意味著什么,?將這種技術(shù)用于更大或更強大的武器是多么容易,?
TossingBot在其自然范圍之外的容器中的準確度為85%,每個容器的開口為25 x 15厘米,。在模擬中,,我們測試了更長距離(最長5米)的推廣,并且該方法運行良好。但在現(xiàn)實世界中,,最遠的盒子離機器人只有2米左右,。我們沒有進行任何更遠的測試,因為任何更難的投擲都會導(dǎo)致UR5機器人達到力 - 扭矩限制,。我們的猜測是,,由于物理學/彈道學的初步估計,該方法應(yīng)該對更長的距離進行合理的推廣,。
TossingBot可能會首先以較低的準確度開始到這些更遠的位置(由于意外的動態(tài)),,但它應(yīng)該很快適應(yīng)新的訓練樣本,因為它繼續(xù)進行在線學習,。在使這種技術(shù)適用于更大和更強大的臂的方面,,只要臂具有良好的可重復(fù)性(例如,制造中使用的那些)和實時控制,,它應(yīng)該是容易的,。
顯揚科技優(yōu)勢:
顯揚科技是國家高新技術(shù)企業(yè),在機器人,、機器視覺方面有多年的研發(fā)與產(chǎn)業(yè)化經(jīng)驗,,可為你提供完善的售后與保修服務(wù),以及其他研發(fā)方面協(xié)作,,并且提供專用移動機器人工作臺,。
顯揚科技已成功銷售Franka機器人、UR機器人,、Robotiq夾具等產(chǎn)品給浙江大學,,清華大學,哈爾濱工業(yè)大學等,,獲得了非常好的評價,。顯揚科技研發(fā)人員超過50人,精通UR,,F(xiàn)ranka,,遨博機器人安裝、調(diào)式,、二次開發(fā)等,,對基于協(xié)作機器人的各種應(yīng)用開發(fā)已有超過8年經(jīng)驗。
關(guān)于顯揚科技:
顯揚科技(jsxmhb123.com)專注研發(fā)并產(chǎn)業(yè)化高速高清三維機器視覺設(shè)備,、智能協(xié)作機器人系統(tǒng),。顯揚科技創(chuàng)建了一個集高精度視覺傳感器、智能協(xié)作機器人,、智能感知與控制系統(tǒng)平臺,,讓機器人更加智能,、可靠,適用于更多復(fù)雜的應(yīng)用場景,。顯揚科技研發(fā)的三維機器視覺設(shè)備精度能達亞微米級,,三維數(shù)據(jù)采集幀率高達300幀,具有高精度,、大景深,、高穩(wěn)定性的優(yōu)勢,已在多個領(lǐng)域成功替代進口同類產(chǎn)品,。目前,,顯揚科技產(chǎn)品已成功應(yīng)用于食品、電器,、陶瓷,、物流、教育科技,、新零售等行業(yè),。顯揚科技創(chuàng)始團隊由香港中文大學數(shù)名博士組成,公司研發(fā)人員均來自海內(nèi)外名校,。公司知識產(chǎn)權(quán)超過50項,,產(chǎn)品已經(jīng)通過歐盟CE認證。顯揚科技已完成投資與融資約5000萬人民幣,。
顯揚生態(tài): UR優(yōu)傲協(xié)作機器人 | AUBO遨博移動機器人 | Franka 協(xié)作機器人 | 艾利特協(xié)作機器人 | Kuka iiwa 協(xié)作機器人 | ABB工業(yè)機器人 | ??倒I(yè)鏡頭 | 海康工業(yè)相機 | 伯朗特工業(yè)機器人 | 愛普生Epson工業(yè)機器人 | robotiq夾爪 | robotiq真空吸盤 | robotiq腕部相機| 慧靈機器人電爪 | 研華工控機 |超恩工控機 | 創(chuàng)想三維3D打印機 | AGV | 機器人關(guān)節(jié) | 精密機械加工服務(wù)
應(yīng)用案例方向:1.三維機器視覺機器人引導(dǎo)系統(tǒng) 2.工業(yè)檢測與測量系統(tǒng)3.教育行業(yè)解決方案4.智慧零售解決方案
應(yīng)用場景:汽車制造行業(yè) | 3C行業(yè) | 電子電氣 | 機械加工 | 液晶半導(dǎo)體 | 食品加工行業(yè) | 醫(yī)藥行業(yè) | 化工行業(yè) | 教育行業(yè) | 生活 | 其他行業(yè)
詳詢:18670025215(丁先生) jsxmhb123.com

