顯揚科技丨UR機器人大扭矩擰緊應(yīng)用方案詳解
發(fā)布時間:2021-06-24 11:53:36 作者:顯揚科技
大扭矩擰緊是汽車總裝和零部件產(chǎn)業(yè)中的常見應(yīng)用。將各種汽車零部件裝配成整車的過程,需要很多種不同類型的聯(lián)接,,其中螺栓聯(lián)接是最重要的聯(lián)接方法之一。由于螺栓聯(lián)接可以獲得很高的聯(lián)接強度,,又便于裝拆,具有互換性,,通過標(biāo)準(zhǔn)化實現(xiàn)了大批量生產(chǎn),,成本低而且價格便宜,經(jīng)常被應(yīng)用到發(fā)動機,、變速箱和底盤等重要位置的裝配中,。螺栓的擰緊質(zhì)量直接影響到產(chǎn)品的安全性和可靠性。
在執(zhí)行螺栓擰緊任務(wù)時,,經(jīng)常會碰到以下問題:
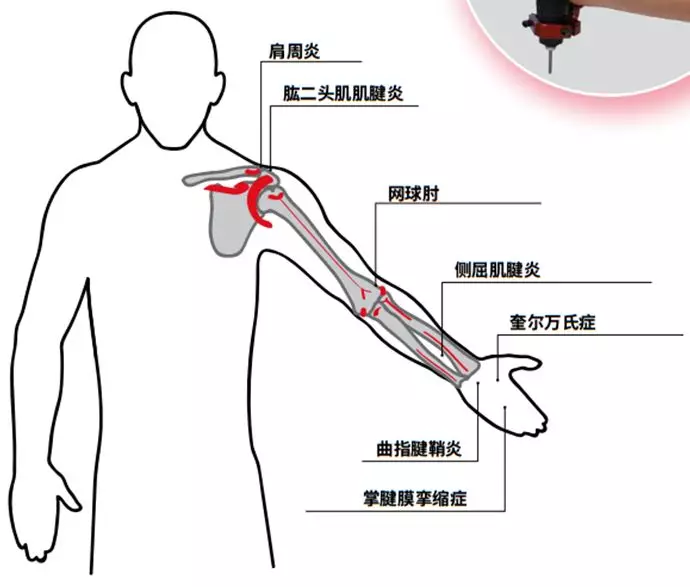
● 職業(yè)病
作業(yè)員長期受到擰緊槍的自重和反作用力的影響,,導(dǎo)致肌腱損傷,而患上左圖所示的職業(yè)病,。
● 產(chǎn)品質(zhì)量穩(wěn)定性
作業(yè)員在做擰緊工作時,,無法避免少打、漏打及擰緊扭矩錯誤的現(xiàn)象,,且螺絲擰緊的質(zhì)量隨作業(yè)員的工作狀態(tài)波動起伏,。
● 人工成本高昂
擰緊工作在大多數(shù)生產(chǎn)過程中,都處于一個高負(fù)荷的工藝環(huán)節(jié),,耗費大量人工成本。
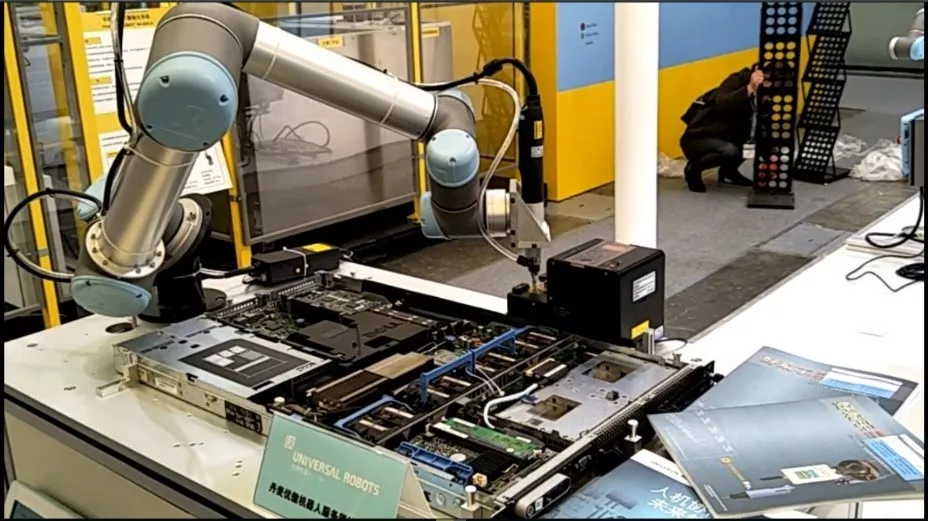
優(yōu)傲機器人用于擰緊的方案:
UR機器人可以代替工人進行24小時不間斷的高負(fù)荷勞動,,同時將產(chǎn)品質(zhì)量控制在一個非常穩(wěn)定的狀態(tài),。本方案設(shè)計的目標(biāo)是將擰緊槍的反作用力平均地分配到機器人的六個關(guān)節(jié)上,我們將從擰緊槍與機器人的安裝方式,、機器人底座安裝方式和機器人軟件設(shè)置等方面進行詳細(xì)介紹,,來指導(dǎo)客戶如何克服擰緊槍的反作用力。通過實際測試,,UR10可以實現(xiàn)的扭矩范圍為120Nm,。
一、負(fù)載重量設(shè)計
1,、在設(shè)計擰緊槍和工裝夾具時,,請UR提供公式計算出機器人最大允許負(fù)載,,實際負(fù)載重量不要超過計算結(jié)果。
2,、在機器人安裝設(shè)置界面,,務(wù)必要準(zhǔn)確設(shè)置有效負(fù)載和重心。
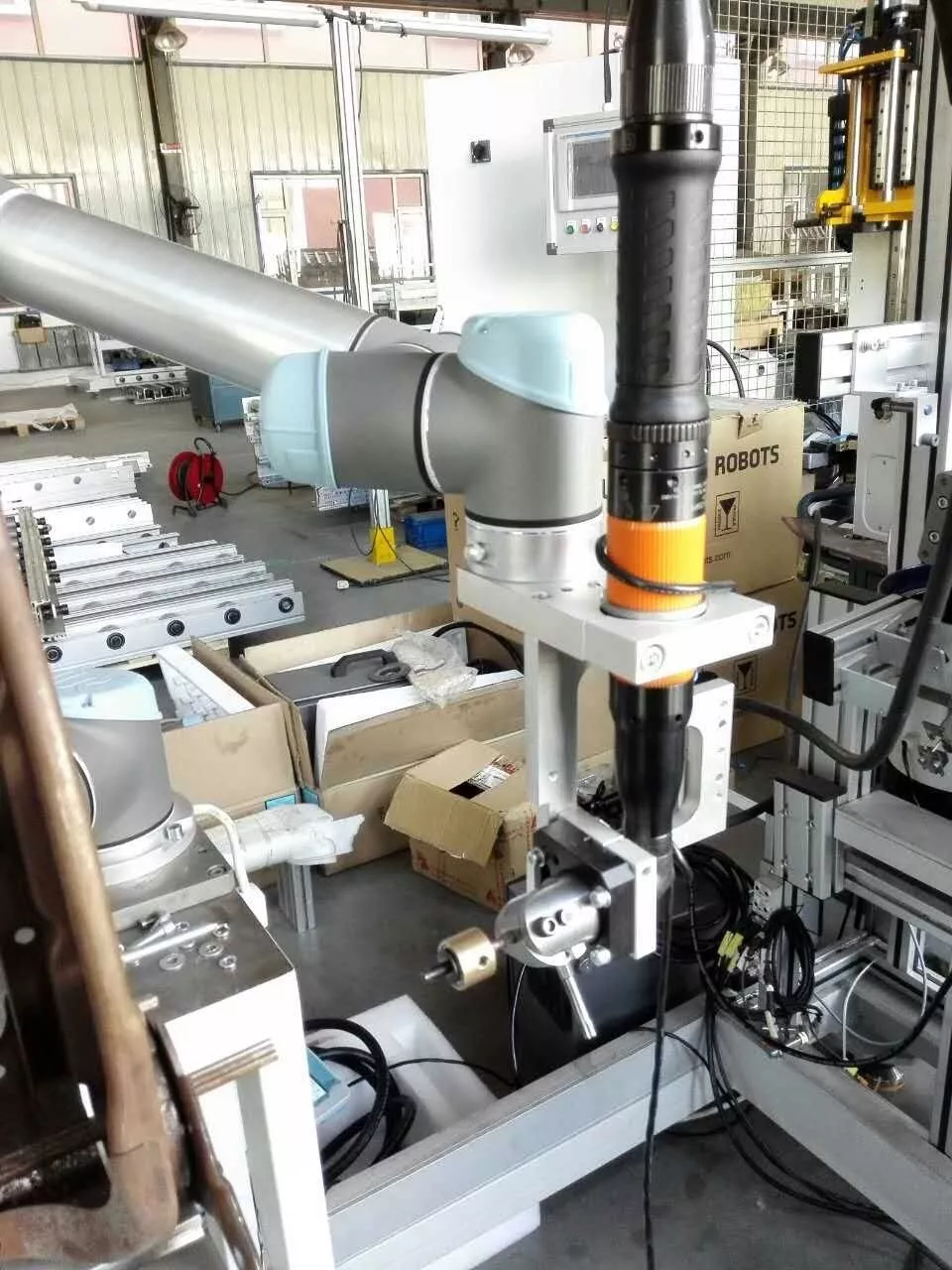
二,、擰緊槍與機器人法蘭盤連接方式
工裝夾具的設(shè)計原則讓擰緊槍旋轉(zhuǎn)軸與手腕3旋轉(zhuǎn)軸方向垂直(如果兩者安裝方向平行,,手腕3將承受來自擰緊槍的最大反作用力,極易報警),,如需添加CCD,,請注意機器人關(guān)節(jié)旋轉(zhuǎn)時與CCD干涉問題。擰緊槍一般分為直頭和彎頭兩種:
1.直頭擰緊槍建議安裝方式如下圖所示:
2.彎頭擰緊槍建議安裝方式如下圖所示:


三,、機器人底座安裝方式
1. 如果螺絲擰緊方向是垂直地面向下的情況,,建議機器人底座傾斜45度安裝,這樣可以避免擰緊槍旋轉(zhuǎn)軸和手腕2旋轉(zhuǎn)方向平行(避免手腕2承受來自擰緊槍的最大反作用力),,建議如下圖所示安裝:

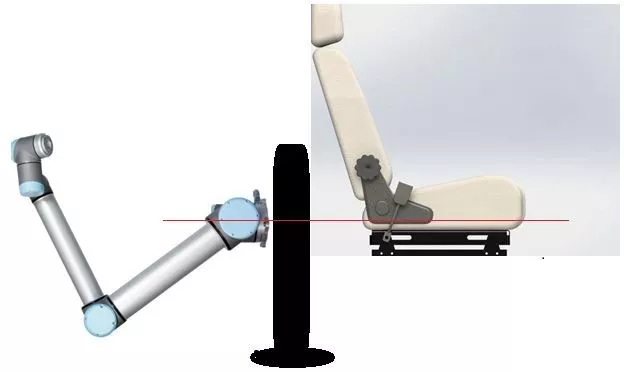
2.螺絲擰緊方向是平行于地面?zhèn)认虻?,且需要擰緊座椅兩側(cè)的情況。
優(yōu)先考慮機器人底座側(cè)裝的方式(這種方式機器人在左右側(cè)之間切換姿態(tài)比較自由),,如下圖所示:
 其次考慮機器人底座正裝的方式,,如下圖所示:
其次考慮機器人底座正裝的方式,,如下圖所示: 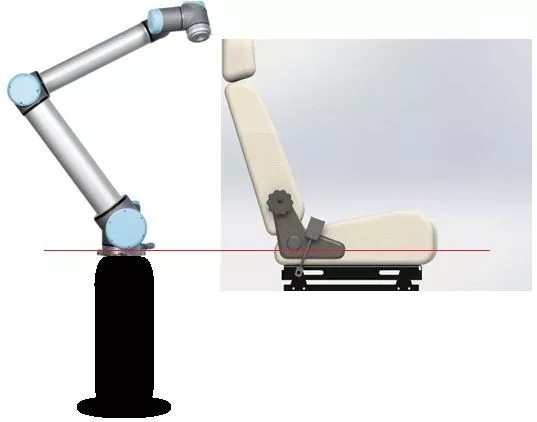
注意:機器人底座位置盡量與螺絲孔位處于同一水平高度。
四,、IO信號連接
優(yōu)傲機器人與擰緊槍通訊一般采用數(shù)字IO信號連接,,優(yōu)傲機器人也支持Ethernet、Profinet,、Modbus tcp和TCP/IP協(xié)議,,可根據(jù)實際需求而定。本方案采用的IO信號連接如下:
機器人IO輸入信號:就緒,、OK,、NG
機器人IO輸出信號:程序序號1、程序序號2,、啟動,、復(fù)位
五、優(yōu)傲機器人程序
機器人程序中,,在啟動擰緊槍旋轉(zhuǎn)信號之前寫入“wait is_steady()”指令,,當(dāng)is_steady()返還值為真時,優(yōu)傲機器人可以接受外部更大壓力或扭矩,,如下圖所示:

擰緊方案說明和結(jié)果
a) 方案結(jié)果
可以通過監(jiān)控擰緊槍在擰緊瞬間,,機器人各關(guān)節(jié)實時扭矩值,判斷設(shè)計方案是否合理,,各關(guān)節(jié)受到扭矩值越平均越佳,。在機器人線程程序中,,使用腳本“get_joint_torques()”得到機器人各關(guān)節(jié)實時扭矩值,可以保持記錄各關(guān)節(jié)最大扭矩值(參考附件中的小程序),。
b) 常見故障處理
故障一:螺絲槍在擰緊瞬間,,由于擰緊槍產(chǎn)生的反作用力較大,機器人易發(fā)生保護性停止,。
對策:從擰緊槍方面,,可適當(dāng)降低旋轉(zhuǎn)速度;從機器人方面,,可通過附件中的小程序監(jiān)控各關(guān)節(jié)的扭矩值,,若六個關(guān)節(jié)受力不均勻,需要改變機器人姿態(tài),。
故障二:螺絲槍擰完螺絲退出時,,被螺絲憋住,機器人易發(fā)生保護性停止,。
對策:建議螺釘不要使用內(nèi)六角式(接觸面積較越摩擦力越大),,可以使用內(nèi)梅花式或外六角式螺釘。
總結(jié):
在使用UR10的眾多擰緊項目中,,測試中較為穩(wěn)定的擰緊槍扭矩范圍,,最大可達120Nm。
顯揚科技優(yōu)勢:
顯揚科技是國家高新技術(shù)企業(yè),,在機器人,、機器視覺方面有多年的研發(fā)與產(chǎn)業(yè)化經(jīng)驗,可為你提供完善的售后與保修服務(wù),,以及其他研發(fā)方面協(xié)作,,并且提供專用移動機器人工作臺。
顯揚科技已成功銷售Franka機器人,、UR機器人,、Robotiq夾具等產(chǎn)品給浙江大學(xué),清華大學(xué),,哈爾濱工業(yè)大學(xué)等,,獲得了非常好的評價。顯揚科技研發(fā)人員超過50人,,精通UR,F(xiàn)ranka,,遨博機器人安裝,、調(diào)式、二次開發(fā)等,,對基于協(xié)作機器人的各種應(yīng)用開發(fā)已有超過8年經(jīng)驗,。
關(guān)于顯揚科技:
顯揚科技(jsxmhb123.com)專注研發(fā)并產(chǎn)業(yè)化高速高清三維機器視覺設(shè)備,、智能協(xié)作機器人系統(tǒng)。顯揚科技創(chuàng)建了一個集高精度視覺傳感器,、智能協(xié)作機器人,、智能感知與控制系統(tǒng)平臺,讓機器人更加智能,、可靠,,適用于更多復(fù)雜的應(yīng)用場景。顯揚科技研發(fā)的三維機器視覺設(shè)備精度能達亞微米級,,三維數(shù)據(jù)采集幀率高達300幀,,具有高精度、大景深,、高穩(wěn)定性的優(yōu)勢,,已在多個領(lǐng)域成功替代進口同類產(chǎn)品。目前,,顯揚科技產(chǎn)品已成功應(yīng)用于食品,、電器、陶瓷,、物流,、教育科技、新零售等行業(yè),。顯揚科技創(chuàng)始團隊由香港中文大學(xué)數(shù)名博士組成,,公司研發(fā)人員均來自海內(nèi)外名校。公司知識產(chǎn)權(quán)超過50項,,產(chǎn)品已經(jīng)通過歐盟CE認(rèn)證,。顯揚科技已完成投資與融資約5000萬人民幣。
顯揚生態(tài): UR優(yōu)傲協(xié)作機器人 | AUBO遨博移動機器人 | Franka 協(xié)作機器人 | 艾利特協(xié)作機器人 | Kuka iiwa 協(xié)作機器人 | ABB工業(yè)機器人 | ??倒I(yè)鏡頭 | ??倒I(yè)相機 | 伯朗特工業(yè)機器人 | 愛普生Epson工業(yè)機器人 | robotiq夾爪 | robotiq真空吸盤 | robotiq腕部相機| 慧靈機器人電爪 | 研華工控機 |超恩工控機 | 創(chuàng)想三維3D打印機 | AGV | 機器人關(guān)節(jié) | 精密機械加工服務(wù)
應(yīng)用案例方向:1.三維機器視覺機器人引導(dǎo)系統(tǒng) 2.工業(yè)檢測與測量系統(tǒng)3.教育行業(yè)解決方案4.智慧零售解決方案
應(yīng)用場景:汽車制造行業(yè) | 3C行業(yè) | 電子電氣 | 機械加工 | 液晶半導(dǎo)體 | 食品加工行業(yè) | 醫(yī)藥行業(yè) | 化工行業(yè) | 教育行業(yè) | 生活 | 其他行業(yè)
詳詢:18670025215(丁先生) jsxmhb123.com

