UR5e機器人使用說明
發(fā)布時間:2021-12-08 19:02:18 作者:顯揚科技
選擇UR5e機器人安裝位置時,,務必考慮機器人正上方和正下方的圓柱體空間,。應避免將工具移向圓柱體空間,,因為這樣會造成工具慢速運動時關(guān)節(jié)卻運動過快,從而導致機器人工作效率低下,,風險評估難以進行。
機器人手臂使用4顆8.8級強度的M8螺栓和底部的4個8.5mm安裝孔安裝機器人手臂,。螺栓必須使用20Nm扭矩擰緊,。
使用預留的兩個Ø8孔和一個銷釘來準確地重新定位機器人手臂。注意:可以采購精確的基座作為附件來使用,。圖1顯示了鉆孔位置和螺絲安裝位置,。
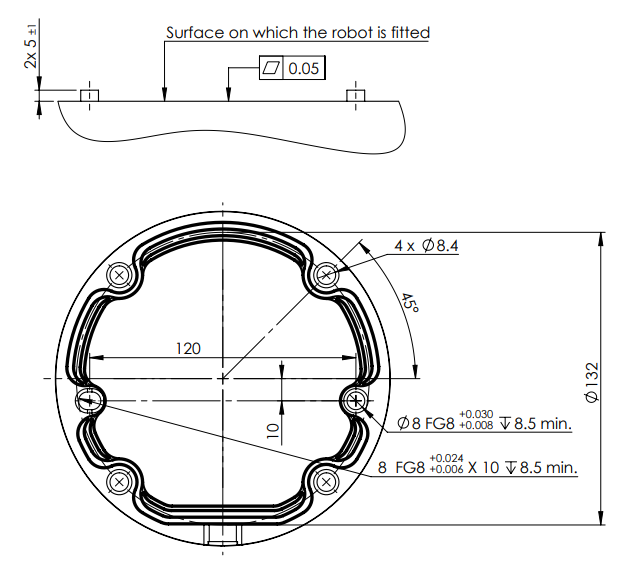
圖1 機器人安裝孔。使用4顆M8螺栓,。所有測量值均以mm為單位
將機器人安裝在一個堅固,、無震動的表面,該表面應當足以承受至少10倍的基座關(guān)節(jié)的完全扭轉(zhuǎn)力,以及至少5倍的機器人手臂的重量,。如果機器人安裝在線性軸上或是活動的平臺上,,則活動性安裝基座的加速度非常低。高加速度會導致機器人發(fā)生安全停機,。
機器人工具法蘭有四個M6螺紋孔,,可用于將工具連接到機器人。M6螺栓必須使用8Nm的扭矩擰緊,,其強度等級為8.8,。為了準確地重新定位工具,請在預留的Ø6個孔中使用銷釘,。圖2顯示了工具法蘭的尺寸和孔模式,。建議對銷釘使用徑向槽孔以避免過度約束,同時保持精確的位置,。安裝工具的螺栓不得超過8mm,。M6螺栓太長將壓在工具法蘭的底部并使機器人短路。
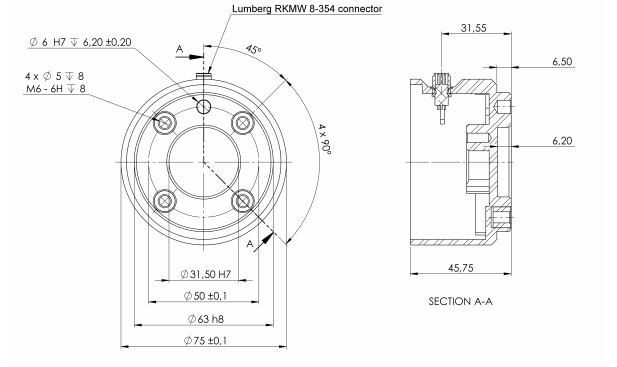
圖2 工具輸出法蘭(ISO9409-1-50-4-M6)是機器人頂端的工具安裝位置,。所有測量值均以mm為單位
顯揚科技(hinyeung.com)由香港中文大學博士團隊創(chuàng)建,,是國家高新技術(shù)企業(yè)。公司主要研發(fā)并產(chǎn)業(yè)化高速高清三維機器視覺系統(tǒng),、智能工業(yè)機器人系統(tǒng),,目前產(chǎn)品三維采集速度高達每秒300幀,最高精度亞微米級,,已在多個領(lǐng)域成功替代進口同類產(chǎn)品,。顯揚科技產(chǎn)品可實現(xiàn)高效率機器人引導,以及工業(yè)檢測與測量,。顯揚科技的產(chǎn)品主要應用在物流行業(yè),、汽車行業(yè)、3C行業(yè),,以及對測量精度要求高的精密制造,、軍工航天、半導體產(chǎn)業(yè)等,。顯揚科技目前已累計獲得投資約5000萬人民幣,,申請及授權(quán)超過50項知識產(chǎn)權(quán),產(chǎn)品通過歐盟CE認證,,已在多個知名企業(yè)得到應用,。顯揚科技與國內(nèi)外知名企業(yè),如顯揚科技已代理URUR優(yōu)傲協(xié)作機器人 ,、AUBO遨博移動機器人,、Franka Emika 協(xié)作機器人,、艾利特Elite協(xié)作機器人、Kuka iiwa 協(xié)作機器人,、ABB工業(yè)機器人,、海康工業(yè)鏡頭 ,、??倒I(yè)相機、伯朗特工業(yè)機器人,、 愛普生Epson工業(yè)機器人,、 robotiq夾爪 、robotiq真空吸盤,、robotiq腕部相機,、慧靈機器人電爪 、大寰機器人電爪,、研華工控機,、超恩工控機、創(chuàng)想三維3D打印機 ,、Mir AGV,、機器人關(guān)節(jié)、精密機械加工服務,。


