探索UR機器人 | UR機器人的操作模式
發(fā)布時間:2021-12-03 18:40:05 作者:顯揚科技
當您配置一個3檔位使動裝置,、設置密碼,、定義一個操作模式可配置I/O,或通過Dasboard服務器時,將啟用操作模式,。
自動模式啟動后,UR機器人只能執(zhí)行預定義的任務,。如果配置了3檔位使動裝置,,則移動選項卡和自由驅(qū)動模式不可用。您不能修改或保存程序和安裝,。
自動模式防護停止只能在自動模式下激活,,因此防護功能僅在自動模式下有效。
手動模式激活后,,您可以使用移動標簽,,自由飛行模式和速度滑塊編程UR機器人,。您可以修改和保存程序和安裝。
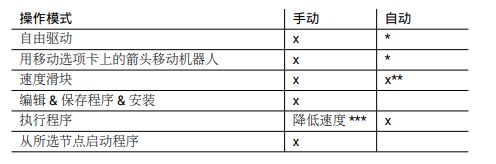
*只有當未配置3檔位啟用設備時,。
**運行頁面上的速度滑塊可在設置選項卡啟用,。
***如果配置了3檔位啟用設備,則除非激活手動高速,,否則UR機器人將以手動降低速度運行,。
通用機器人機器人未配備3位啟用裝置。如果風險評估需要設備,,則必須在使用UR機器人之前將其連接,。如果未配置3檔位啟用裝置,則在手動模式下不會降低速度,。
在選擇自動模式之前,,任何暫停的防護措施必須返回到完整功能。只要有可能,,手動操作模式應在保護區(qū)外的所有人員進行,。用于在操作模式中切換的設備必須放置在受保護的空間之外。UR機器人處于自動模式時,,用戶不得進入安全防護的空間,,除非配置了自動模式安全防護輸入。
使用操作模式安全輸入
1.在安裝選項卡中,,選擇安全I/O,。
2.配置操作模式輸入。要配置的選項將出現(xiàn)在下拉菜單中,。
3.當操作模式輸入為低時,,機器人處于自動模式,當操作模式輸入為高時,,機器人處于手動模式,。
注意:物理模式選擇器(如果使用)必須完全符合ISO10218-1:第5.7.1條的選擇。
使用PolyScope
1.設置一個密碼(見21.3.2)在操作模式間進行切換,。
2.要在模式之間切換,,請在標題中選擇配置文件圖標。
注意:當啟用3位啟用設備的安全I/O配置時,,PolyScope自動處于手動模式,。
使用儀表板服務器
1.連接到儀表板服務器。
2.使用設置操作模式命令,。
•設置自動操作模式
•設置操作模式手動
•清除操作模式
3檔位使動裝置
當配置3檔位啟動裝置并且操作模式處于手動模式時,,只能通過按下3檔位啟用裝置來移動UR機器人。連接和配置三檔位啟用設備可使自動模式防護停止。3檔位啟用裝置對自動模式?jīng)]有效果,。
手動高速
此按住保持運行功能,,手動高速允許工具速度暫時超過250mm/s。只有當您的UR機器人處于手動模式并且配置了3位啟用設備時,,它才可用,。如果配置了3位啟用設備,但未按下,,在手動模式下,機器人將進行防護停止,。在自動模式和手動模式之間切換需要完全釋放3位啟用設備,,然后再次按下以允許UR機器人移動。
注意:當使用手動高速時,,使用安全關節(jié)限制或安全平面來限制UR機器人的移動空間,。
顯揚科技專注研發(fā)并產(chǎn)業(yè)化高速高清三維機器視覺設備、智能協(xié)作機器人系統(tǒng),,使命是“讓人類高效地用好機器人”,。目前,顯揚科技自主研發(fā)的三維機器視覺兼容多種品牌的機器人并已成功應用于食品,、電器,、陶瓷、物流,、教育科技,、新零售等行業(yè)。此外,,顯揚科技生態(tài)系統(tǒng)包括以下品牌:UR優(yōu)傲協(xié)作機器人 ,、AUBO遨博移動機器人、Franka Emika 協(xié)作機器人,、艾利特Elite協(xié)作機器人,、Kuka iiwa 協(xié)作機器人、ABB工業(yè)機器人,、??倒I(yè)鏡頭 、??倒I(yè)相機,、伯朗特工業(yè)機器人、 愛普生Epson工業(yè)機器人,、 robotiq夾爪 ,、robotiq真空吸盤、robotiq腕部相機、慧靈機器人電爪 ,、大寰機器人電爪,、研華工控機、超恩工控機,、創(chuàng)想三維3D打印機 ,、Mir AGV、機器人關節(jié),、精密機械加工服務,。


